Project Pisces

Dual-Tailed Biomimetic Robot Tuna
Group 29
MAE 494 Design Project, Spring Semester 2018
Department of Mechanical and Aerospace Engineering
State University of New York at Buffalo


Introduction
Increased advancement in robotic and drone technology is influencing a demand for such technology to be implemented as more efficient replacements to human counterparts. Specifically, aquatic applications including undersea operation, aquatic life form observation, pollution search, military applications, oceanic supervision. Keeping in tradition of seeking solutions from naturally occuring systems, the aquatic robot is to be modeled after the Tuna for their overall speed, and cruising maneuverability. Bio-inspired robotics, specifically aquatic in nature, trace back to MIT’s Robotuna in 1994. The motivation behind the dual tailed mimetic tuna robot is to optimize the efficiency of the undulatory motion of the tuna’s peduncle in order to achieve and execute cruising and hovering swim performance. The dual peduncles provide for equal and opposite oscillatory motion providing for increased stability of the leading edge of the system
Problem Statement
To both achieve replication and optimizational efficiency of the undulating action of the tuna’s peduncle, which is essential in hovering maneuvers and cruising type swim performance, in order to influence a stationary leading edge within the bio-inspired robotic vehicle for implementation in various underwater applications. The reason behind a dual tailed structure is to constrain the oscillatory movement of the thrust inducing fins to the tail end of the tuna. While swimming, the tuna utilizes the lateral motion of the tail to generate thrust and simultaneously incorporates an equal and opposite head sway to counteract the tail. This head counteraction provides stability of the fish and allows the fish to navigate in straight paths. The two tail design will utilize the two tails to cancel out the lateral motion of the other, which allows the head to remain fixed in position. The prototype will validate the efficiency and damping in noise of a robotic fish. Meaning a robotic fish will be able to act as a surveillance vehicle in an underwater environment without disturbing its surroundings. Additionally, the two tailed method will demonstrate that with two tails there will be a node in the body of the prototype. This suggests the possibility that the body can be outfitted with a camera or when upscaling cargo can be stored within.

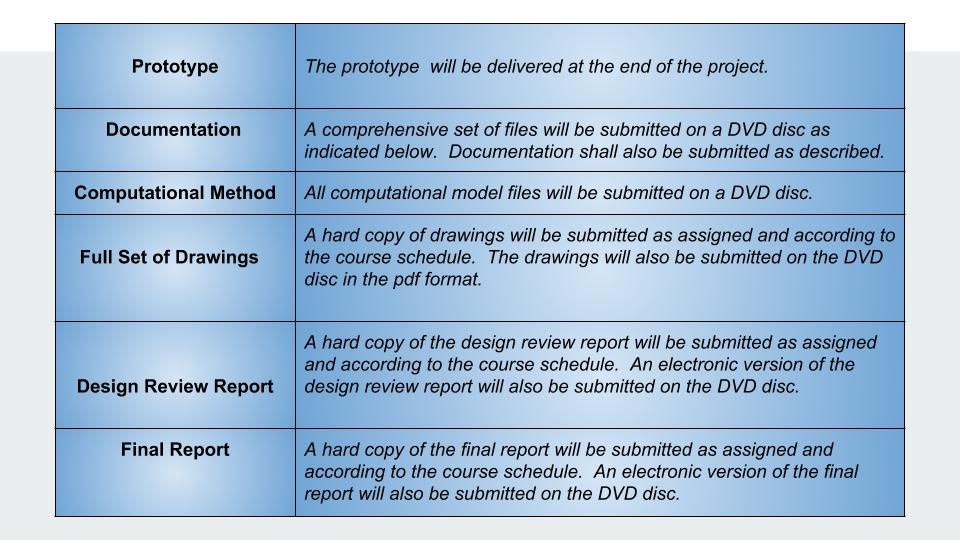
Project Deliverables